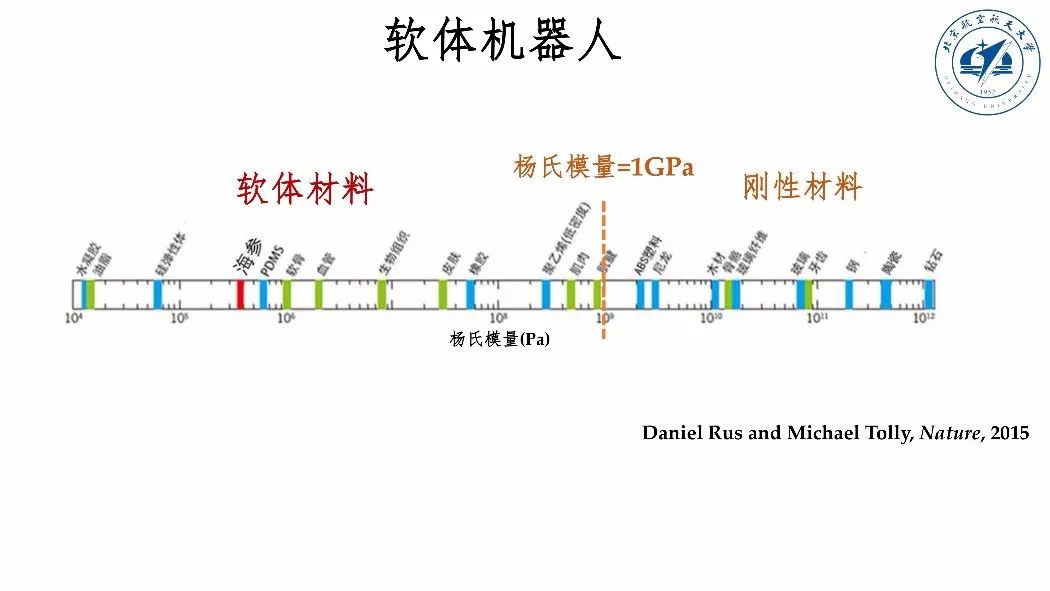
首先我们看一下软体机器人的定义,什么是软体机器人?简单来讲,就是大部分的材料,如果把材料按照一个频谱从左到右进行一字排开的话,处于这个频谱右端的材料是刚性材料,硬如像钻石是最硬的一类材料;到左边像水凝胶或者像我们人类的脂肪是软性材料。它们的硬度差了大概10的9次方之多。
中间有一条线GPa是什么概念呢?就是相当于我们的肌腱,比ABS塑料还要再软一点,比我们肌腱要再硬一点。这条线把所有的材料频谱分成左右两边。靠刚性的那一端主要是组成了传统的刚性机器人的核心部件,比如说铰链、减速器,比如电动机、螺钉等等。
而处在这个材料频谱的左端的,比如像硅胶、血管、人体的皮肤、橡胶等等,这些都是软体材料。如果大部分机器人的机械部件或者核心部件是由软体材料组成的,我们就可以把它称之为软体机器人。这个定义是由Daniela Rus,麻省理工人工智能实验室的主任画的这一张图,这个图也成了软体机器人的一个基本的定义。
我们看一下这个软体机器人到底是什么时候产生、怎么产生,以及它总体的一个发展趋势是什么样的。从这个图上来看,2011年的时候,由George M.哈佛大学的老先生,他最早在美国国家科学院刊发表了一篇文章,隔年又在《科学》发表了一篇文章,他讲到用硅胶材料做出了一个能够爬行的四足动物,但是它只有一种材料。
随着研究的快速发展,逐步地到了向多材料发展,就是上边最右边这个图,通过3D打印从单一材料到多材料的过渡。右下角这个图是人们逐步把智能液态的响应材料加入到了硅胶材料当中,让它能够对外部的应力。就是当它拉它、卷它的时候,它的内部的液体会产生一部分的变化,比如光强以及传感的输出会发生变化,这样就为软体机器人加入了一定的智能。
再到下面中间这张图是去年在《自然》发表了一篇很有名的文章,用液体化的3D打印,把所有的驱动、传感、甚至控制器都打印到了一个小小的章鱼,可以通过柔性的,像逻辑控制器FPGA来控制章鱼的八个触手,产生有规律的、节律的运动。
右下角这个图是科研人员将培养的小鼠细胞对它进行了一个基因编程,让这种小鼠细胞对外部的光强能够产生反应。当他把小鼠的细胞平铺到一个黄金材料上的时候,就可以做成一条鱼;这条鱼在外部光强的响应下会产生波动。
所以从2011年到2017年,这七年的时间内,软体机器人从单一的材料过渡到了多材料,再到了智能材料,最后有可能到生物材料,这是一个发展的趋势。所以从这个趋势结合起来讲,未来的发展方向一定是它结合驱动、传感、变刚度、多功能的复合材料,以及添加软体机器人的控制方法。目前控制方法这一块是比较欠缺的,这是一个学术或者是创新方面的一个主要的发展趋势。

那么这个软体机器人用于干什么?首先第一个是用于抓持作业,这个抓持作业就如这个图上所看到的,左边这个蓝色的球状是康奈尔做出的样机;中间的这个是北航的气动软体抓持器,左下角的是费斯托做出的一个仿生的抓持器。这一类所有的软体机器人是用于抓持作业,抓持作业就是相当于物品分解或者是抓持形状不一、大小不等的物体时发挥它的优势。
第二类的应用需求是在于医疗、康复与微创,医疗康复包括上肢的软体的康复训练,以及下肢的康复或者助力;同时也包括了软体的微创手术这个方面,它也可以发挥一定的作用。
在康复它大概是什么样子呢?一个中风的患者,一旦中风之后,他很难去拿捏一个东西。但是当他戴了一个外部的手套,这是一个软体的驱动器,把软体驱动器做在手套,就可以被动地带动这个手指完成某些既定的运动。它跟手的一个安全的交互,了整个人机交互的安全性,这是由于软体驱动器自身的优势所带来的。
为什么软体机器人能产生这么多有影响力或者说是比较原创的工作呢?我总结了一下,就是它源于几个重要的因素。第一个方面,就是由于以3D打印、智能材料为主的这一批交叉学科,加入到了机器人这个行业当中,所以一下让机器人这个行业不再只是工程师或者机械、或者自动化这两个领域的人,而加入了像生物、材料、3D打印等这些比较热点的研究问题上,所以让它从一个单一的学科变成了一个多学科交叉。所以利用3D打印、软体机器人,还可以探索一系列新的科学问题,或者说未来包括国防或者其他的应用。
刚性机器人的传感和软体机器人的传感是不一样的,因为刚性机器人的传感可能是一个IMU,可能是一个小的电板;但是软体机器人需要一个不同的东西,最好是液体,或者说常流动性、软的东西。我们决定将这种液态的金属与软体机器人进行一个结合。左边这个视频大多数同学都见过,这是我小时候最喜欢的一个视频,叫《终结者2》,无数个小的液态金属的液滴能够自组装。
正如它的优势所说,它是没有驱动机构,具有多种的功能属性,包括传感、复、自组装等等。而软体机器人所具有的复的低成本,以及安全柔互这方面,这两者如果结合在一起,可以产生很多的东西。比如说液态金属第一点,就是它对温度非常,可以看到在室温下面,它是处于刚性态,可以搭载一定的重量,比如说到300克;但是一旦加热的情况下,它立马变成了液态。
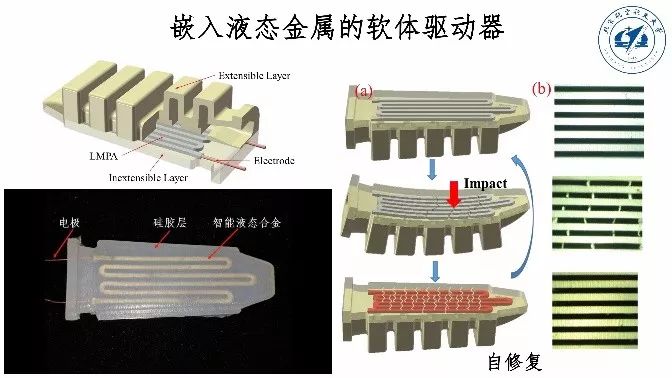
基于这样的一个基本的想法,我们就开始逐步地加入了软体,的这个基本的软体驱动层,是由硅胶组成的;逐步地加入了软体的传感层、加热层,通过多个加热段实现一个拼接,可以达到一个什么效果呢?这个是通过加热,7秒钟之内可以融化。融化之后,金属就会成为一个液态,而没有融化的地方是呈固态,通过这样一个简单的方式,就可以实现固态与液态共存的一个状态。
这样的一个状态可以用来什么实现什么样的效果?这是一个软体驱动器,里面可以通过加入液态金属,同时选择性地加热不同段,可以实现多个,可以模拟一个人的手指。可以看到它就加入了一个气压,但是它可以实现多种运动,同时多种运动的时候,它的信息可以被反馈回来。
我们并不仅仅满足于一个抓手,我们进一步考虑的是能不能模拟人的手臂,或者模拟一个章鱼的手臂,就是将多个三维运动的模块拼接在一起,通过这样的模块拼接,可以实现一个什么样的效果呢?这样一个软体臂未来有什么用?未来的用处就是,我们在大连进行了一个初步的水下的抓持,这是在水下10米抓持一个活的海参,通过在外部视觉的下找到目标物体,然后将目标物体对应的筐里面。这次一共抓了两只海参、两个海胆,以及几个扇贝,虽还有待于进一步提高,但是未来长远的发展,我们一方面希望替代潜水员一些的工作,另一方面希望为国家的发展做一些自己的贡献。


